Dérivabilité sur un intervalle
On note indifféremment {f(t)} ou {M(t)}.
Si {f'(t_{0})\ne 0}, il existe un intervalle ouvert centré en {t_{0}} et sur lequel {f(t)\ne f(t_{0})} si {t\ne t_{0}}.
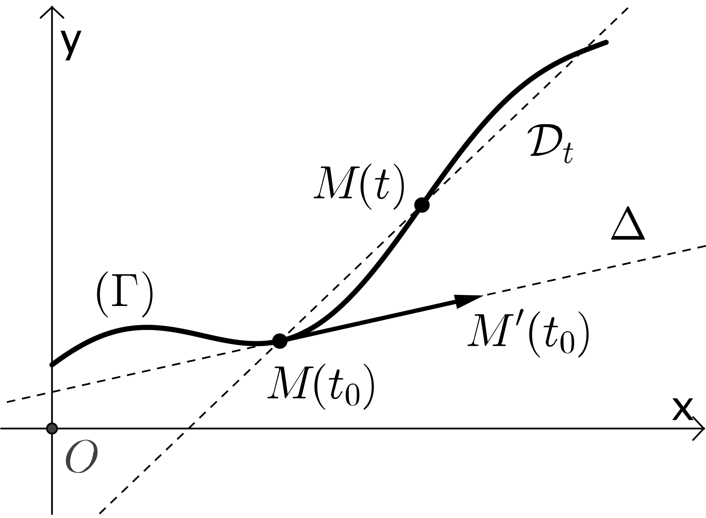
Le vecteur {T_{f}(t_{0},t)=\dfrac{f(t)-f(t_{0})}{t-t_{0}}} dirige alors la « corde » {{\mathcal D}_t} passant par {M(t_0)} et {M(t)}.
L’hypothèse {f'(t_{0})\ne 0} implique que, quand {t\to t_0}, la « limite » de la droite {{\mathcal D}_t} est la droite {\Delta} (passant par {M_{0}} et dirigée par {f'(t_{0})}). Cette droite {\Delta} est appelée tangente en {M(t_0)} à la trajectoire {t\mapsto M(t)}.
Quant au vecteur {f'(t_{0})} (ou {M'(t_{0})}), il est le « vecteur vitesse » de {M(t)} «à l’instant {t=t_{0}}».
Le cas {f'(t_{0})=0} signifie que la vitesse de {M(t)} s’annule à l’instant {t_{0}} : cela ne veut pas dire pour autant que le point {M(t)} s’arrête dans son mouvement (penser à un choc parfait).
Dans ce cas, il faut trouver autre chose pour diriger la tangente à la trajectoire en {M(t_{0})} (par exemple le vecteur accélération {M''(t_{0})}).